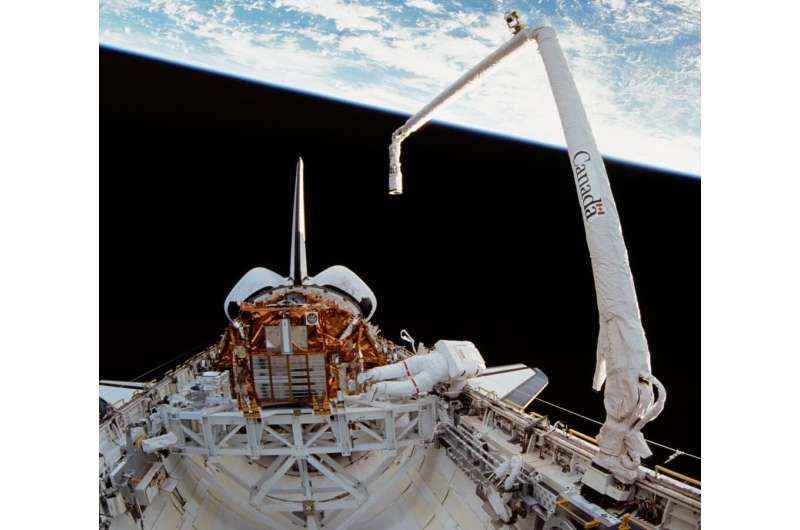
1996’da Uzay Mekiği Endeavor görevi sırasında STS-72 sırasındaki robotik Canadarm. Kaynak: NASA – https://archive.org/details/STS072-722-041, Public Domain, https://commons.wikimedia.org/w /index.php?curid=29803999
Robotlar, genişleyen uzay ekonomisinin anahtarlarından biri olacak. Fırlatma maliyetleri düştükçe -Umarım Starship ve diğer büyük kaldırma sistemleri devreye girdiğinde önemli ölçüde azalır- uzay ekonomisine girişin önündeki en önemli engel nihayet ortadan kalkacaktır.
Peki o zaman ne olur? Literatürde artan sıklıkta iki kısaltma ortaya çıkıyor: uzayda servis, montaj ve üretim (ISAM) ve Yörüngede servis (OOS). Bir dizi makale boyunca, bu kısaltmaların ne anlama geldiğini ve yakında nereye gideceklerini ayrıntılarıyla anlatan bazı makalelere bakacağız. İlk olarak, robotların denkleme nasıl uyduğunu inceleyeceğiz.
Uzay robotları, daha sonra astronotlarının onları çalıştırdığı uzay mekiği ile Mekik Uzaktan Manipülatör Sisteminin (SRMS) fırlatıldığı 1981 yılından beri ortalıkta dolaşıyor. Son kırk yılda orijinal kullanım durumunun çok ötesine geçtiler ve Uluslararası Uzay İstasyonu’nun (ISS) montajından, Dünya’nın yörüngesindeki arızalı bir uyduya hizmet vermek için daha yakın zamanda kavram kanıtlama görevlerine kadar her şeyde giderek daha önemli bir rol oynadılar.
dergide yayınlandı Gelişmiş Akıllı SistemlerÇin’deki Harbin Institute of Technology’deki State Key Robotics and Systems Laboratuvarı’ndan yeni bir makale, uzayda tamamen işlevsel robotlar hayalini gerçekleştirmek için hala yapılması gereken bazı çalışmaların ayrıntılarını veriyor. Bu işi beş farklı işlevsel alana ayırır.
Birincisi ve otonom robotlarla zaman geçiren herkesin aşina olduğu bir tanesi görmedir. Görüş sistemleri, özellikle otonom arabaların çalışmasına bağlı olanlar, burada Dünya üzerinde sürekli olarak geliştirilmektedir. Bununla birlikte, görsel çevre uzayda o kadar kaotik olmasa da, bir robotun neye baktığını görsel olarak anlamasını sağlamak, özellikle de bir uydu kontrolsüz bir şekilde takla atıyorsa, zor olabilir.
Hizmet verilmesini bekleyen bir uydunun yanaşma bağlantı noktalarının etrafına yerleştirilmiş daireler gibi (argonda “işbirlikçi” olarak bilinir) örüntü tanıma hala zordur. Kısmen bunun nedeni, tanıma algoritmasını gerçekleştirmenin hesaplama yükünün robotun kendisinde yapılması gerektiğidir. Bu, ele alınması gereken artan güç tüketimi ve ısı ile doğrudan ilişkili olarak artan hesaplama gücü gerektirir. Bir robottan yardım almak için tasarlanmamış “işbirliği yapmayan” bir uyduyu tanımak, özellikle gerçek zamanlı olarak daha da zordur.
Bir robot nereye gittiğini ve neyle etkileşime girmeye çalıştığını gördüğünde, bir sonraki adım oraya gitmek ve o şeyle etkili bir şekilde etkileşime geçmektir. Burada dikkate alınması gereken birkaç faktör var ve makale bunları toplu olarak “hareket ve kontrol” teknolojileri olarak adlandırıyor.
Bir robotu etkileyen çok az yerçekimi olduğunda güçleriyle nasıl başa çıkılacağı da dahil olmak üzere, birkaç benzersiz kontrol sorununa çözümler sunarlar. Özellikle, hareket komutları ve özellikle belirli nesneleri hareket ettirmeye çalışmak, robotun gövdesinde ve manipülatöründe titreşimler gibi şeylere nasıl neden olur?
Bu, özellikle robotun kendisi UUİ veya uzay mekiği gibi çok daha büyük bir ağırlığa bağlı değilse doğrudur. Dinamik kontrol algoritmaları, daha tehlikeli titreşimlerin bazılarını sönümlemeye yardımcı olabilir ve kontrolsüz bırakılırsa potansiyel olarak robotu parçalara ayırabilir.

Uzaydaki farklı robotların zaman çizelgesi. Kredi: Ma ve ark.
Ancak titreşimleri sönümleyecek bir kontrol sistemi olsa bile, bir nesneyle etkileşime geçmek için birden fazla kolu koordine etmek de dahil olmak üzere diğer koordinasyon faktörleri yine de karmaşık olabilir. Bu daha önce yapılmış olsa da, Dünya’daki robotlarda olduğu gibi koordinasyonu aynı anda yapmak hala zor.
Bir robot (veya onun manipülatörü) amaçlanan hedefine ulaştığında, başka bir teknolojinin onunla etkileşime girmesi gerekir; Robotikte, son efektörler, robotun nesnelerle nasıl etkileşime girdiğidir. Bunlar insan elinin eşdeğeridir, ancak çok daha işlevsel olabilirler, çünkü hem insan elinin yapılmadığı şeylerden (tornavidalar) yapılabilirler hem de tamamen başka bir şeye dönüştürülebilirler, örneğin bir el ile değiştirilerek. yumuşak jel tutucuya bir tornavida.
Uç efektörlerin olasılıkları ve bir robotun uç efektörler arasında geçiş yapmadaki etkinliği sonsuzdur ve robotları uzayda olabildikleri kadar yetenekli hale getirmek için hala çok sayıda teknik çalışma yapılması gerekmektedir.
Bir robotun uç efektörünü etkili bir şekilde çalıştırmaya yardımcı olmanın bir yöntemi, bir insanın robotu uzaktan çalıştırmasına izin vermektir. Bu, astronotların mekiğin içinden SRMS’yi veya ISS’nin içinden Canadarm2’yi çalıştırdığı uzaydaki robotların çoğu için nispeten yaygın bir uygulama olmuştur. Ancak, teleoperasyon zaman alır ve bir astronotun zamanı son derece değerlidir. Bu nedenle robotları yerden uzayda uzaktan çalıştırma çabaları sürüyor.
Son zamanlarda, bir astronotun Dünya’da bir robotu kontrol ettiği, bunun tersi için bazı çabalar olduğunu bildirdik. Bu deneyler, ay veya Mars gibi diğer dünyaların yüzeyinde robot çalıştırma konseptini kanıtlamayı amaçlıyordu. Bu teleoperasyon biçimi, yine aynı gecikme zorluğundan muzdarip olacaktır ve dahası, gecikme, bir robotun yörünge yolunun neresinde olduğuna bağlı olarak değişebilir.
Bu soruna, operatörün geri bildirim beklemeden ileriyi planlayabilmesi için zaman gecikmesinin sonunda robotun nerede olacağını tahmin eden bir sanal gerçeklik kontrol kurulumu da dahil olmak üzere çeşitli çözümler önerilmiştir. Güç geri bildirimi de popüler bir seçenektir, ancak yine de aynı zaman gecikmesi sorunlarından muzdariptir. Bu engel için çok sayıda teknik çözüm var, ancak hiçbir şey sinyallerin uzun mesafelerde anında iletilmediği gerçeğini ortadan kaldıramaz.
Dünya’da bile, hala zorluklar var. Belgede belirtildiği gibi, yüksek doğrulukta zemin doğrulaması zordur. Mühendislikte doğrulama, bir şeyin ortamda beklendiği gibi çalıştığını kanıtlamak anlamına gelir, çalışması amaçlanan bir robottur. doğrulama testi sırasında kaçınılmaz olarak ortaya çıkan sorunlar.
Soruna yönelik birkaç teknik çözüm bir süredir kullanılıyor; robotun havada süzülmeyi simüle etmesi için cebri hava ceplerinde askıya alınması, bu koşullarda nasıl çalışacağını test etmek için bir uçakta serbest düşüş veya parabolik uçuş kullanılması ve hatta batma dahil. bir havuzda ve su altında nasıl çalışacağını görmek.
Döngü içinde donanım, diğer endüstrilerde kullanılan en umut verici yeni teknolojidir. Bu, robotik sistemin beklenen davranışını modeller ve robotun uzayda deneyimleyebileceği yazılım aracılığıyla belirli ortamları taklit eder. Ancak, bu sistem için modellerin oluşturulması karmaşıktır ve doğrulama testinin kendisinde hatalara yol açabilir. Şimdiye kadar, henüz yerde geliştirilirken bir robotun uzayda çalışmasını sağlamak için optimal bir çözüm yoktur.
İronik bir şekilde, uzayda robot operasyonunun kendisi, uzayda robotların kendilerinin uzayda tasarlanmasına ve monte edilmesine izin verecek kadar büyük bir altyapı oluşturarak bu son sorunu çözebilir. Bu hala çok uzak, ancak dünya çapında çok sayıda ekip bunu gerçeğe dönüştürmek için çalışıyor. Bir gün olacak ve bu teknik zorlukların üstesinden gelmek, bunun böyle olmasına yardımcı olacak.
Daha fazla bilgi:
Boyu Ma ve arkadaşları, Yörüngede Hizmet için Uzay Robotlarındaki Gelişmeler: Kapsamlı Bir İnceleme, Gelişmiş Akıllı Sistemler (2023). DOI: 10.1002/aisy.202200397
Alıntı: Yörüngedeki robotlar daha da popüler hale geliyor, ancak önümüzde hâlâ birçok teknik zorluk var (2023, 1 Haziran) https://phys.org/news/2023-06-robots-orbit-popular-technical adresinden alındı (1 Haziran 2023) .html
Bu belge telif haklarına tabidir. Kişisel çalışma veya araştırma amaçlı adil ticaret dışında, yazılı izin olmaksızın hiçbir bölüm çoğaltılamaz. İçerik sadece bilgilendirme amaçlıdır.