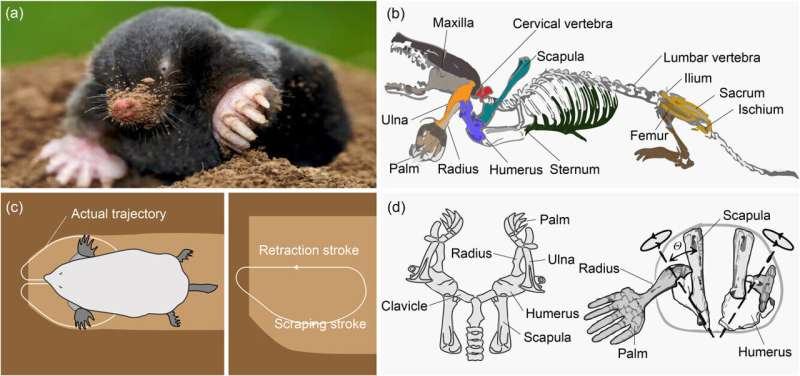
Ön forelimb-Burring köstebek. a) Hayvan morfolojisi. b) Vücut iskeleti. c) ön ayak yörüngesi. d) ön ayak iskeleti. Kredi: Gelişmiş Akıllı Sistemler (2024). Doi: 10.1002/Aisy.202300392
Toprak altına oymak, özellikle bu toprak diğer gezegenlerde olduğunda yepyeni bir dünya açar. Mars gibi bir dünyada en üst regolit katmanının altına girmek, hala yaşamla birlikte mevcut bir dünyaya erişim sağlayabilirken, ayda bir su kaynağı keşfetmeye yol açabilir.
Yani, neredeyse 30 yıldır, bilim adamları burada yeryüzünde en iyi bilinen oyuk makinesine dayanan robotlar geliştiriyorlar-köstebek. Ne yazık ki, şimdiye kadar uzaya giren modeller çeşitli nedenlerle başarısız oldu, ancak bu daha fazla araştırma grubunun bir köstebek robotunun kendi versiyonlarını mükemmelleştirmeye çalışmasını engellemedi.
Çin’deki Guangdong Teknoloji Üniversitesi’ndeki bir araştırma grubundan bir makale, doğanın daha benzersiz ama yetenekli uzmanlarından birini taklit etme çabalarını ve hayal kırıklıklarını açıklıyor. Çalışma yayınlanmış dergide Gelişmiş Akıllı Sistemler.
“Mole” robotlarının önceki sürümlerinde çalışan geliştirme ekiplerine adil olmak için başarısızlık her zaman onların hatası değildi. Gezegen Altsız Yürüyüş Aracı (Plüton) robotu Mars Express’e takıldı ve doğada görülen hiçbir şeye benzemeyen bir çekiç mekanizmasına sahipti. Mars’a yaptı, ancak Mars Express’in bağlı olduğu Beagle 2 Lander’ın güneş panellerini düzgün bir şekilde konuşlandıramadığı için başarılı bir şekilde test edilmedi.
https://www.youtube.com/watch?v=penky5uyeyq
Mars’ın başka bir misyonu olan Insight, benzer bir görevle başka bir soruşturma yaptı. Isı Akışı ve Fiziksel Özellikler Paketi (HP3) probu, Maritan toprağına 5m’yi gömmek ve Mars’ın iç kısmından gelen ısıyı ölçmek için tasarlanmıştır. Ne yazık ki, beklenmedik toprak koşullarına girdi ve yoğun bir şekilde bildirdiğimiz gibi, amaçlandığı gibi yuvalanamadı. Birden fazla başarısız denemeden sonra, görevin bu kısmı sonunda terk edildi.
Başka bir deyişle, diğer dünyalara oymak zordur. Ama bu Guangdong’daki takımın denemesini engellemedi. Robotları, gerçek bir köstebeke HP3 veya Pluto’dan çok daha benzer olması anlamına gelir. Mevcut görevler her ikisi de sondaj tekniklerinin formlarını kullanırken, yeni robot gerçek mollerin ne yaptığını taklit etmeyi amaçlayan eylemleri kullanıyor.
Farklı mol türleri tarafından kullanılan iki tür kazma hareketi vardır. Birincisi ve medyada en çok tasvir edilen kişi, büyük önkollarını kullanarak önlerinden kiri uzaklaştırmaktır. Daha az bilinen bir başka yöntem, büyük dişlerini kire ısırmak ve kollarını altlarına itmek için kullanmaktır.
Bunu biliyoruz çünkü köstebek oyuk davranışının kinematiğinde çok fazla araştırma yapılmıştır. Bu değerlendirmeler, hareketlilik için ön ve arka bacakların önemini gösterdi ve kiri köstebek vücudunun etrafında hareket ettirdi.
 Bileşen yapılandırması. b) Fonksiyonel mekanizmaların tasarımı ve DOF'ların konfigürasyonu. c) Her fonksiyonel bileşen için çalışma alanı analizi. D) 3D model tasarımı. Kredi: Gelişmiş Akıllı Sistemler (2024). Doi: 10.1002/Aisy.202300392")
Mole’den ilham alan oyuk robotunun tasarım konsepti. A) Bileşen yapılandırması. b) Fonksiyonel mekanizmaların tasarımı ve DOF’ların konfigürasyonu. c) Her fonksiyonel bileşen için çalışma alanı analizi. D) 3D model tasarımı. Kredi: Gelişmiş Akıllı Sistemler (2024). Doi: 10.1002/Aisy.202300392
Kinematiği anlamak sadece ilk adımdır ve Guangdong ekibi, belki de sevimli ve sevimli bir tane olmasa da, kuşkusuz bir köstebek gibi görünen bir prototip oluşturmada bir sonraki adımı attı. Farklı önkolları ve arka bacakları vardır ve başı bir köstebek gibi şekillendirilir, ancak göz eksikliği göz önüne alındığında, neredeyse bir kabuk gövdesine benziyor. Gelişmiş elektronik, güç sistemleri ve motorlar robotun gövdesinin içinde gizlenir ve bir köstebek şeklini daha eksiksiz bir şekilde taklit etmesine izin verir.
Prototiplerini test etmek için araştırmacılar, robotun ay veya Mars regolitinde görmeyi beklediği boyutu simüle etmek için bir plastik parçacık yatağı yaptılar. Robot başarıyla kendini parçacıklara gömdü. Bununla birlikte, ilerlemek ve mollerin ünlü olduğu tünel türlerini yaratmakta zorluk çekti. Bu, prototipin mevcut yinelemesinde modellenen önkollar ve arka uzuvlar arasındaki daha karmaşık koordinasyondan kaynaklanıyordu.
Bu ilk prototip, bir gün başka bir dünyada kullanılabilecek daha eksiksiz bir modele doğru bir adımdır. Gelecekteki araştırmalar, kağıt açıkladığı gibi, bu botun hareketliliğinin gerçekten “çok mod” olmasına izin vererek, yuvalanmasına, taramasına, koşmasına ve hatta yüzmesine izin verecek teknikler geliştirecek. Dünyada tüm bu yeteneklere ihtiyaç duyacak başka bir dünya bulmak zor olabilir, ancak biyomimetik tasarım geliştikçe, yeni dünyaları keşfederek sevimli ve tüylü şeyler gibi daha fazla bot görmeyi bekleyin.
Daha fazla bilgi:
Tao Zhang ve ark. Gelişmiş Akıllı Sistemler (2024). Doi: 10.1002/Aisy.202300392
Atıf: Yürüyüş Mole-Bot, 4 Şubat 2025’ten alınan diğer gezegenlerin toprağını (2025, 4 Şubat) karakterize edebilir.
Bu belge telif hakkına tabidir. Özel çalışma veya araştırma amacıyla herhangi bir adil işlem dışında, yazılı izin olmadan hiçbir parça çoğaltılamaz. İçerik yalnızca bilgi amaçlı olarak sağlanır.




