Delfta Teknik Üniversitesi ve Federal Politeknik Okulu Lozannes’den mühendisler, neredeyse aktif yönetime enerji harcamadan bir köpek gibi hareket edebilen dört ayaklı bir robot geliştirdiler. Bu karar, canlı organizmalar gibi, dayanıklı, uyarlanabilir ve ekonomik olan temel olarak yeni mekanizmaların yaratılmasına yol açabilir.
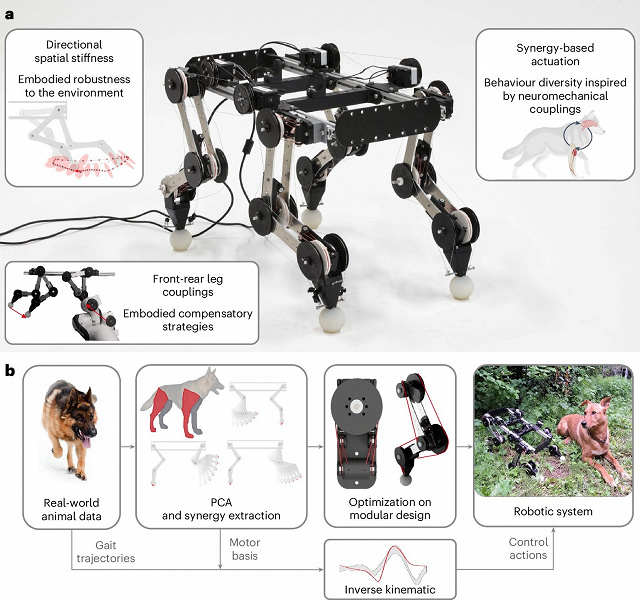
Anahtar fikir doğada ortaya konur. Bilim adamları, hayvanların kaslarının ve tendonlarının bir “akıllı yaylar” sistemi olarak çalıştığı ve şok ve şokların enerjisini harekete geçirdiği gerçeğine dikkat çekiyorlar. Alışılmadık bir deney bir örnekti: su akışına yerleştirilen ölü balık, aktif kas çabaları olmadan vücudun şekli ve esnekliği nedeniyle akıma karşı bükülmeye ve hareket etmeye başladı. Aynı şekilde, yeni Paws robotu motorların minimum maliyeti – sadece karmaşık görevler için açılır, örneğin adımlar boyunca atlama veya kaldırma. Ana çalışma mekanik tarafından gerçekleştirilir: tendonları simüle eden özel olarak hesaplanmış yaylar ve kablolar, adımın enerjisini otomatik olarak yeniden dağıtıyor.
Robotun tasarımı için araştırmacılar, makine öğrenimi algoritmaları kullanarak köpeklerin hareketlerini analiz ettiler. Bu, hayvanın beyninin uzuvları koordine etmek için kullandığı dört temel paterni (“sinerjiler”) tanımlamayı mümkün kıldı. Pençelerde, pençeleri bağlayan bir kablo sistemi aracılığıyla uygulanır – sanki ön ve arka uzuvlar tek bir mekanik “sinir sistemi” tarafından kontrol edilmiş gibi. Örneğin, bir pençe ile ittiğinde, geri kalanı otomatik olarak ayarlanır ve dengeyi korur.
Sonuç etkileyici: 12 mobil formasyonlu bir robot sadece dört motor tarafından kontrol ediliyor. Koşu bandında, adımın genliğini tuval hızına uyarlayan doğal bir dörtnala gösterir. Aynı zamanda, robot dış etkilere karşı dirençlidir – dava üzerindeki etkiden sonra, hareket ritmini hızla geri yükler. Pasif mekanik, işlemcinin katılımı olmadan 2 cm yüksekliğe kadar engellerin üstesinden gelmenizi sağlar.
https://www.youtube.com/watch?v=wlkeinv9cj0&playerid=4931
Bugün pençeler hala kesinleştirmeyi gerektirse de, teknoloji, bölgelerde saatlerce devriye gezebilen, kurtarma operasyonlarına katılabilecek veya sık şarjın sık sık şarj olmanın imkansız olduğu koşullarda çalışabilecek robotlar oluşturmanın yolunu açar. Proje yöneticisi Kozimo Della Santina, “Amacımız biyolojik sistemlerin etkinliğini modern makinelerin işlevselliği ile birleştirmektir” diyor. “Örneğin, bir pil şarjı tasarrufu yaparak mekanik pahasına yolunu planlayan bir depolama dronunu hayal etmek.”
Zaten, Paws sadece çalıştırabiliyor, aynı zamanda oturabiliyor, büküyor, pasif ve aktif modları birleştirebiliyor. Bir sonraki adım, bu tür sistemlerin otonom robotlar ve endüstriyel platformlara daha büyük cihazlara entegrasyonu olacaktır.