Kredi: NASA / Justin Yim
Hareketler işlerin hareket ettirilmesini sağlar ve bazı hareket biçimleri onları diğerlerinden daha iyi hareket ettirir. Bu daha etkili hareket türleri, uzay araştırmaları için daha da doğru olan çevreye bağlı olarak değişir. Yeryüzünde ve hatta helikopterler gibi diğer gezegenlerde iyi çalışabilecek yöntemler başkalarında tamamen işe yaramaz olabilir. Ancak özel hareket biçimleri bol ve NASA Gelişmiş Kavramlar Enstitüsü (NIAC) bu yıl için I hibeleri, bu tür uzmanlaşmış bir forma daha yakından bir bakış – atlama.
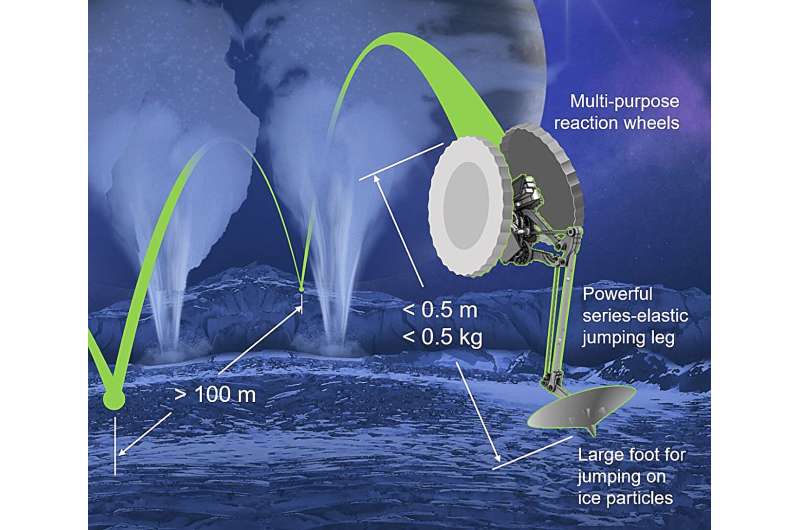
Tüy (LEAP) programı boyunca bacaklı keşif, Enceladus’tan yayılan büyük tüylerin alt kısımlarını keşfetmek için özel olarak tasarlanmış bir atlama robotu kullanacaktır. Konsept, başlangıçta UC Berkeley’deki bir ekip tarafından geliştirilen Salto Jumping Robotuna dayanıyor. Şimdi Illinois Üniversitesi’nde profesör olan Justin Yim ve NIAC I I hibe sahibi, doktorasının bir parçası olarak üzerinde çalıştı. tez.
Fraser ile yapılan bir röportajda Dr. Yim, Salto’yu neyin benzersiz kıldığını detaylandırıyor. Sadece yaklaşık 50 santimetre ölçen boyutu ve 0,5 kg’dan daha az bir süre planlanan ağırlık için Dr. Yim, robotun Enceladus yüzeyinde yatay olarak 100 m yukarı atlayabileceğine inanıyor.

LEAP Robotunun İşlemleri – Orbilander’dan başlıyor ve geri dönüyor. Kredi: Justin Yim / NASA
Bu, buzlu aydaki diğer hareket biçimlerine göre önemli bir avantajdır. Enceladus’un atmosferi yok, bu yüzden uçmanın, Mars’ta yapabildiği gibi rotorlardan ziyade yakıt kullanacak bir roketle güçlendirilmesi gerekecekti. Bununla birlikte, yüzey aynı zamanda buzlu ve düzensizdir, bu da bir gezici olmayı pratik hale getirir.
Ancak atlama, her iki dünyanın da en iyisini sunar. Nispeten az güç gerektirir ve bu nedenle bir robotun bataryasını tüketmeden birden çok kez yapılabilir. Ama aynı zamanda en zorlu parçaların üzerinde yükselen arazi agnostiktir. Ayrıca robotun, Enceladus’un Satürn’ün muhteşem halkalarından birini oluşturan Satürn sistemine çıkardığı tüylerin alt kısmından doğrudan atlamasına izin verecektir.
Başka hiçbir hareket biçimi, tüylerin kaynağına yaklaşamaz ve bu tüyler Enceladus’un en ilginç kısımlarından bazıları olduğundan, onları yakından incelemek birçok nedenden dolayı caziptir.
Özellikle bir görev olan 2023 dekadal araştırmasının desteklediği önerilen bir amiral gemisi misyonu olan Engeladus Orbilander, yörünge yolunda bir kişiden uçarken bir geyserin üst kısımlarını yakalayabilir, ancak herhangi bir veri toplayamazdı alt kısımlarında. En azından başlangıçta öngörüldüğü gibi, Lander bir geyser boyunca hareket edemezdi.
https://www.youtube.com/watch?v=wxexoj1gkoo
Leap, potansiyel olarak sistemle bir yolculuğa çıkabilir. Lander’ı bir fırlatma platformu olarak kullanmak, robotun kendisinin önemli tasarım çabalarını koruyacaktır. Orbilander’ı bir şarj istasyonu olarak bile kullanabilir ve daha da uzakta keşfetmesine izin verebilir.
Bununla birlikte, bazı zorluklar var – Salto’nun orijinal tasarımında, mühendislerinin robot perdesini kontrol etmesine izin veren, duvarlardan birden fazla sıçrama için hizalanmanın başarısını gerçekleştirmesine izin veren, video oyunlarında yaptığı gibi, sadece bir reaksiyon tekerleği vardı. . Bununla birlikte, kendini gerçekten kontrol etmek için, SEAP, sapma ve ruloları kontrol etmek için iki reaksiyon tekerleğine ihtiyaç duyar ve mühendislere robotun oryantasyonunun üç ekseninde doğrudan kontrol sağlar.
Dr. Yim, Faz I çalışmasının bir parçası olarak, araştırmacıların, robotun düşmesi durumunda robotu düzeltmek için bu üç boyuttaki hareketi kontrol etmek için bu reaksiyon tekerleklerini kullanmayı değerlendirmeyi planladığını da sözlerine ekledi. Kaçınılmaz olarak, Engeladus’un pürüzlü ve buzlu kaygan yüzeyi göz önüne alındığında, inkar edilemez bir şekilde düşecektir.
Dr. Yim Fraser ile tartıştığı gibi, robotlar için her zaman boyut, ağırlık ve yetenek arasında bir değiş tokuş vardır. Daha büyük LEAP versiyonları bile daha küçük bir tane kadar uzak veya verimli bir şekilde seyahat edemezdi – ancak daha fazla yük taşıyabilirler. Küçük bir atlama robotunun sınırlamalarından biri, atlama yeteneğine yerleştirilen kütle sınırlarıdır. Bu nedenle, Dr. Yim, bir akış ölçer ve kamera gibi basit enstrümantasyonun, daha fazla içgörü sağlayabilecek ancak çok olabilecek bir kütle spektrometresi gibi daha fazla enstrümantasyondan ziyade, tüylere ne taşıyabileceğinin kapsamı olmasını bekler. Atlama için hantal.
https://www.youtube.com/watch?v=wl_3ewdha6m
Tüm NIAC Faz I projeleri gibi, bu hala geliştirilmesinde çok erken. Bu turun sonucunun, gelecekteki herhangi bir tasarımda veya prototiplemede dikkate alınması gereken parametreleri gösteren bir vaka çalışması olması bekleniyor. Enceladus’ta olsun ya da olmasın, LEAP’ın arkasındaki atlama konsepti, gelecekteki birçok robot için önemli bir hareket tarzı gibi görünüyor, bu yüzden yakında yakınınızda daha fazla atladığını görmeyi bekliyoruz.
Atıf: Enceladus’un Geysers (2025, 12 Şubat) üzerinden atlayabilir 13 Şubat 2025 https://phys.org/news/2025-02-robot-enceladus-geysers.html
Bu belge telif hakkına tabidir. Özel çalışma veya araştırma amacıyla herhangi bir adil işlem dışında, yazılı izin olmadan hiçbir parça çoğaltılamaz. İçerik yalnızca bilgi amaçlı olarak sağlanır.




