Çin Bilimler Akademisi Otomasyonu Enstitüsü’nden bir grup uzman, çevrenin koşullarına bağlı olarak yüzme modlarını değiştirebilen bir balık şeklinde yumuşak bir robot geliştirdi.
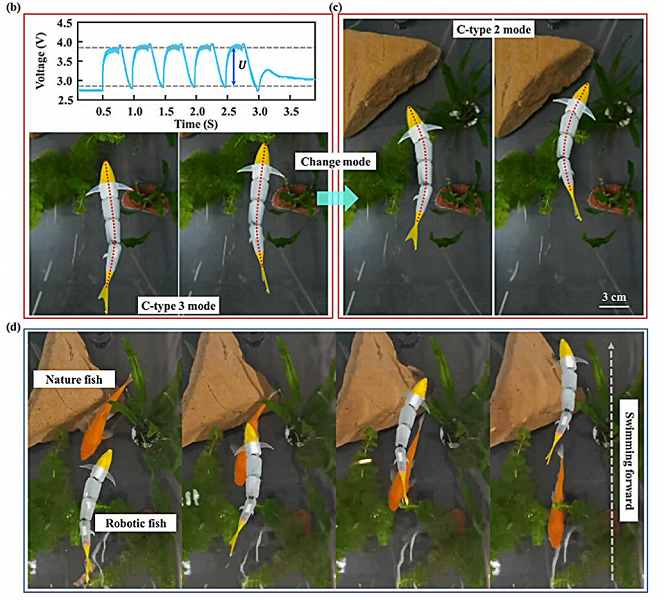
Yeni gelişimin temel özelliği, hareket sistemlerinin, algılamanın ve kontrolün tek bir cihazda entegrasyonudur. Robot, mevcut analoglardan olumlu bir şekilde ayırt eden dört farklı yüzme modunu birleştirebilir.
Tasarım, biyo -ik bir yaklaşıma dayanmaktadır. Mühendisler, yumuşak bir sürücü ile birleştirilmiş esnek bir çerçeve oluşturmak için 3D baskı teknolojisini kullanarak uskumru yapısını yeniden üretti. İkincisi üç fonksiyonel katmandan oluşur: sıkıştırma kaynakları, dielektrik elastomerik membranlar ve esnek elektrotlar.
Çevredeki değişiklikleri algılamak için, geliştiriciler yüksek önde gelen esnek deformasyon sensörleri kullandılar. Bu sensörler, robotun su ve çevresel parametrelerdeki konumunu belirlemesine izin verir, bu da optimal yüzme modları arasında geçiş yapma olasılığını sağlar.
Uyarma genliğinin ve birkaç biyonik kas bloğunun çalışma dizisinin eşzamanlı kontrolü, robotun canlı balıkların karakteristik çeşitli yüzme modlarını yeniden üretmesine ve su ortamının değişen koşullarına uyum sağlamasına izin verir.
Gelişme, sualtı robotik alanındaki potansiyeli gösterir ve deniz ekosistemleri, arama ve kurtarma operasyonları ve su altında etkili hareket gerektiren diğer alanların incelenmesinde kullanılabilir. Canlı organizmaların hareketlerini taklit edebilen uyarlanabilir robotların oluşturulması, çok çeşitli problemleri çözmek için daha gelişmiş sualtı cihazları yaratmanın yolunu açar.







