
Film yakalama cep sisteminin yapısı. Kredi: Uzay: Bilim ve Teknoloji
Son yıllarda uzaya fırlatma faaliyetlerindeki önemli artışla birlikte yörüngeden çıkan uzay araçlarının sayısı da keskin bir şekilde arttı ve bu durum hem aktif yörüngedeki uzay araçları hem de gelecekteki uzay faaliyetleri üzerinde ciddi bir etki yarattı. Uzay aracının aktif olarak yörüngeden çıkarılmasına yönelik bir teknoloji olarak hizmet veren geleneksel halat ağı yakalama sistemleri, uzay enkazını azaltma ve temizleme konusunda büyük bir potansiyele sahiptir.
Ancak halat sistemleri, uzun süreler boyunca şekli koruma zorluğu, kendi kendine dolaşmaya yatkınlık, enerji kayıpları ve etkili yakalama alanının azalması gibi zorluklarla karşı karşıyadır. Bunun aksine, ince filmler normal şekiller boyunca katlanıp açılabilir ve iplere kıyasla daha fazla esneklik ve güvenilirlik sunar. Dolaşma sorununa etkili bir çözüm olarak ortaya çıkıyorlar ve uzay enkazının azaltılması ve kaldırılması için umut verici bir yöntem sunuyorlar.
Yakın zamanda bir inceleme makalesinde yayınlanan içinde Uzay: Bilim ve TeknolojiProfesör Wei Cheng’in Harbin Teknoloji Enstitüsü’ndeki ekibi, Pekin Kontrol Mühendisliği Enstitüsü ve Benha Üniversitesi’nden araştırmacılarla işbirliği içinde, ince bir film yakalama cep sistemi tasarladı.
Bununla birlikte, bu sistemin esnek yapısı, hareket sırasında önemli deformasyonlara ve titreşimlere eğilimlidir ve bu da uzay aracı operasyonlarına önemli ölçüde müdahale edilmesine neden olur. Bu bozuklukları niceliksel olarak analiz etmek için bu çalışma, ince film cep yakalama sisteminin dinamik modellemesine ve tutum kontrolüne odaklanmaktadır.
Araştırma, hızlı, tekil olmayan bir terminal kayma kipli denetleyicinin (FNTSM) ve bir tutum izleme kontrol yasasına entegre edilmiş bir sabit zaman genişlemesi gözlemcisinin (FxESO) geliştirilmesini içermektedir. Kontrolörün etkinliği sanal bir prototipin oluşturulmasıyla doğrulanır. Bu araştırma, sistemin gelecekteki yörünge uygulamasına teorik destek sağlıyor.

Film yakalama cep sisteminin çalışma süreci. Kredi: Uzay: Bilim ve Teknoloji
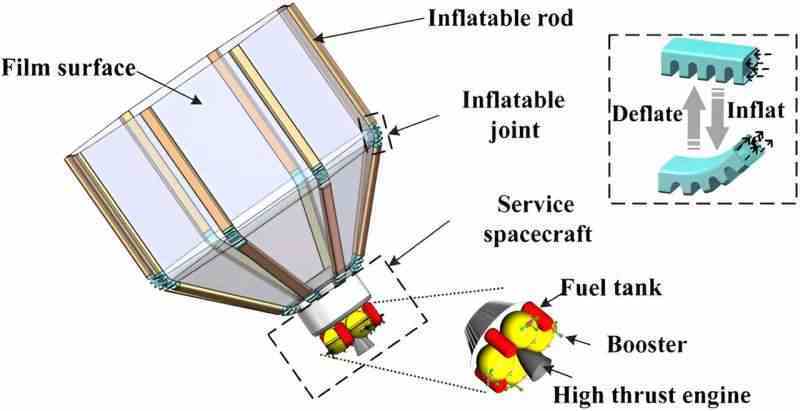
Öncelikle yakalama cebi sisteminin modelini oluşturun. Şişirilebilir çubuklarla desteklenen geniş, esnek bir membran yapısını kullanan üst kısım, sekizgen bir prizma oluşturarak yakalama mekanizması için geniş bir zarf sağlarken, alt kısım silindirik bir şekil alıyor.
Sistemin açılması ve geri çekilmesi, şişirilebilir esnek bağlantılar kullanılarak şişirme ve indirmenin ayarlanmasıyla sağlanır. Sistemin çalışma süreci temel olarak 3 aşamadan oluşmaktadır. İlk olarak, uzay aracı sistemi, yakalanan hedefe yaklaşmak için yüksek itkili motor tarafından çalıştırılır. Daha sonra şişirilebilir esnek bağlantılar hedefi saracak şekilde şişirilir. Son olarak, servis uzay aracı, yakalanan hedefi mezarlık yörüngesine sürüklemek için aktif olarak manevra yapar.
Daha sonra, ince film cep yakalama sisteminin dinamik modelini oluşturmak için Mutlak Düğüm Koordinat Formülasyonunu (ANCF) kullanın. Film yüzeyinin hareketini tanımlamak için, enterpolasyon polinomları aracılığıyla küresel konum vektörünü temsil eden 8 düğümlü yüksek dereceli ANCF elemanlarını kullanın ΦBen (XBensenBen).
Green-Lagrange gerinim tensörünü kullanarak malzeme noktalarının gerinimini tanımlayın ve bunu küresel konum vektörü gradyan tensörünün yerine koyun JBen Elemanın hareket denklemlerini türetmek. Elemanın kinematik denklemlerini çıkarmak için sanal iş ilkesini kullanın. Ayrıca, denetleyiciyi tanıtın senaçısal hız ω(ω)ve birim kuaterniyon Q.
Açısal hız hatası da dahil olmak üzere tutum izleme hatalarının türevlerini türetin ωe ve tutum rotasyon matrisi Aqe. Son olarak, uzay aracının eylemsizlik momentinin etkilerinin de dahil edilmesi JR ve dış rahatsızlık Duzay aracının tutum dinamik denklemlerini türetin.
-
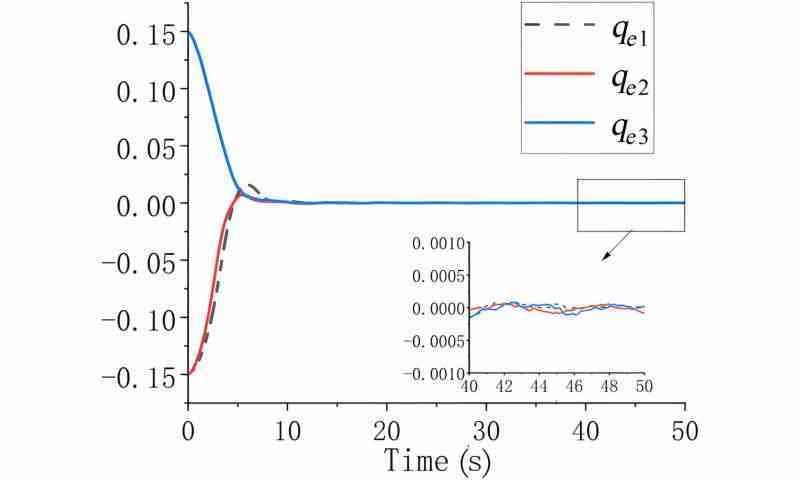
Tutum hatası qe eğriler. Kredi: Uzay: Bilim ve Teknoloji
-
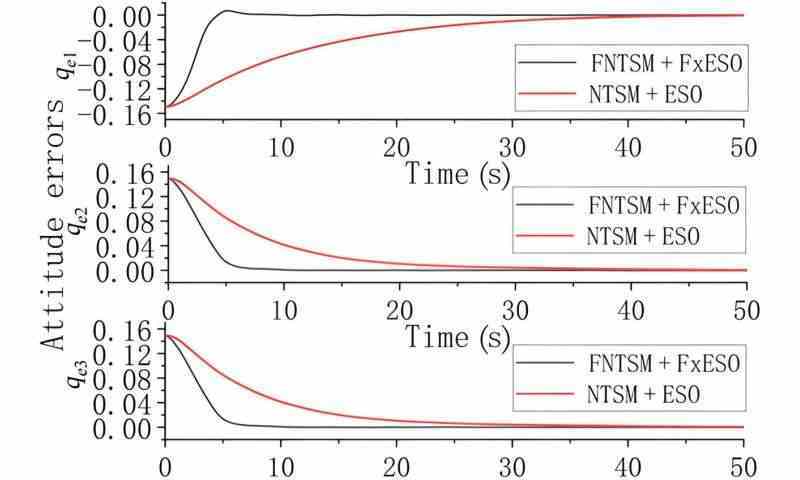
FNSMC + FxESO ve NTSM + ESO arasındaki karşılaştırma. Kredi: Uzay: Bilim ve Teknoloji
Daha sonra yazar, doğrusal olmayan kayma kipi kontrolünü temel alarak bir Hızlı Terminal Kayma Kipi (FTSM) yüzeyi tasarladı. F. FTSM’deki tekillik sorunlarını önlemek için, Hızlı Tekil Olmayan Terminal Kayma Modu (FNTSM) yüzeyi F, şu durumlarda tasarlanmıştır: |Qei| < ψ.
Sabit Zamanlı Genişletilmiş Durum Gözlemcisinin (FxESO) kullanıma sunulması, gözlem hatası için dinamik denklemlerin tasarlanmasını ve belirsizliklerin tahmin edilmesini mümkün kılmayı içerir. Son olarak, FTNSM ve FxESO’yu temel alan bir uzay aracı kontrolörü, sınırlı bir süre içinde yakınsama ve kararlılığa ulaşmak için tasarlanmıştır.
Bunu takiben yazar sanal bir prototip oluşturdu ve ilgili dinamik ve kontrol teorilerinin sayısal simülasyon analizlerini gerçekleştirdi. Çalışma, uzay aracı tutum manevralarından sonra sistemin yavaş yavaş stabilize olduğunu ortaya çıkardı.
Ancak esnek çubuklarda hala titreşimler mevcuttu, bu da membranın tam olarak sıkışmasını engelliyor ve membran yüzeyinde sürekli kırışıklıkların oluşmasına neden oluyordu. Ayrıca FNTSM + FxESO kontrolörü, Tekil Olmayan Terminal Kayma Modu (NTSM) + Genişleme Gözlemcisi (ESO) kontrolörü ile karşılaştırıldı ve bu kontrolör altındaki tutum hataları analiz edildi.
Sonuçlar, FNTSM + FxESO kontrol cihazının, uzay aracını 10 saniye sonra istenen konuma getirdiğini göstermektedir; bu, NTSM + ESO kontrol cihazına kıyasla yaklaşık 25 saniye daha hızlıdır. Bu, sistemin tutum hatasının yakınsama hızını önemli ölçüde artırır.
Ayrıca, bu kontrolör, kararlı durum tutum hatasını 10 büyüklüğünde tutarak yüksek genlikli titreşimleri etkili bir şekilde bastırabilir.-4. Bu, önerilen kontrolörün yüksek verimliliğini, hassasiyetini ve kararlılık performansını göstermektedir.
Daha fazla bilgi:
Zhuoran Huang ve diğerleri, Film Yakalama Cep Sistemi ile Uzay Aracının Dinamiği ve FNTSM Kontrolü, Uzay: Bilim ve Teknoloji (2023). DOI: 10.34133/space.0079
Pekin Teknoloji Enstitüsü Press Co., Ltd tarafından sağlanmıştır
Alıntı: Film yakalama cep sistemiyle uzay aracının dinamikleri ve FNTSM kontrolü üzerine araştırma (2024, 28 Şubat) 28 Şubat 2024 tarihinde https://phys.org/news/2024-02-dynamics-fntsm-spacecraft-capture-pocket adresinden alındı. HTML
Bu belge telif haklarına tabidir. Özel çalışma veya araştırma amacıyla yapılan her türlü adil işlem dışında, yazılı izin alınmadan hiçbir kısmı çoğaltılamaz. İçerik yalnızca bilgilendirme amaçlı sağlanmıştır.