
Robotları herhangi bir sıklıkta takip ettiyseniz, tekerleğe karşı bacak tartışmasıyla karşılaşmış olduğunuzdan hiç şüpheniz olmasın. Örneğin bir depo, dönen bir Locus sistemi yerine neden ayaklı bir Digit robotunu tercih etsin? Drone’ların patlayıcı popülaritesi, uçuşla ilgili benzer tartışmalara yol açtı. Envanter otomasyonuna olan son ilgi, uzun raflarla uğraşmak söz konusu olduğunda İHA’lar ve yuvarlanan sistemler arasında benzer tartışmalara yol açtı.
Robotlar genellikle tek bir amaç göz önünde bulundurularak inşa edilir. Bu, bir şeyi son derece iyi yaptıkları anlamına gelir (umarız), ancak mevcut bir robota yeni numaralar öğretmek zordur. Yazılım ve yapay zeka, yalnızca bir donanım parçası yerleşik sınırlamalara sahip olduğunda bir yere kadar gidebilir. Bu arada, genel ve hatta çok amaçlı sistemler inşa etmek, söylemesi yapmaktan çok daha kolaydır.
Görsel Kaynakları: Doğa İletişimi
Dolayısıyla robotikçiler, robotikçilerin genel olarak yaptığı şeyi yapıyor: İlham almak için doğaya bakmak. Ne de olsa, hayvanlar ve insanlar, durum gerektirdiğinde uyum sağlama konusunda genellikle çok iyidirler. Kağıt Nature’da yayınlandı Haziran ayının sonunda, Multi-Modal Mobility Morphobot robot sisteminin ayrıntıları anlatılacaktır. İsmin kulağa 80’lerin sonundaki Teenage Mutant Ninja Turtle taklidi gibi gelen biraz tekerleme olduğu göz önüne alındığında, onların liderliğini takip edeceğiz ve bundan böyle M4 olarak anacağız.
Makale, bir dizi farklı biyolojik ilhamın ayrıntılarını veriyor. Yüzmek ve yürümek için palet kullanan bir deniz aslanı var; tehlikeyi kontrol etmek için arka ayakları üzerinde duran bir mirket; ve yokuş yukarı yürürken yardım ve denge için kanatlarına dayanan chukar kuşu (benim için yeni olan – öncelikle Asya ve Avrupa’da yaşayan bir keklik).
M4’ün kalbinde, şeklinin gerektiği gibi uyum sağlamasına izin veren, karbon fiberden ve 3D baskılı parçalardan oluşan mafsallı bir gövde bulunur. Bu, aynı zamanda tekerlek işlevi gören dört adet quadcopter tarzı rotor içerir.
“M4’te iddia edilen hareket plastisitesini doğrulamak için, tekerlekli hareket, uçuş, MIP, çömelme, nesne manipülasyonu, dört ayaklı hareket, dik yokuşlarda itici destekli MIP ve büyük engellerin üzerinden yuvarlanma dahil olmak üzere birkaç deney gerçekleştirdik.” gazetenin yazarları yazıyor. “Ayrıca, M4’ün tasarımının ölçeklenebilir olduğunu ve bağımsız operasyonları destekleyen taşıma kapasitesi kapasitelerine ulaşabileceğini göstermek için, M4’te yerleşik sensörler ve bilgisayarlar kullanarak tamamen otonom çok modlu yol planlamayı test ettik.”
Ekip, M4’ün hareket halindeyken uyum sağlamasını gerektiren engelli parkurlar kurdu. Spesifik formlar tamamen araziye dayalıdır, ancak başka faktörler de rol oynamaktadır. Örneğin uçmak, yokuş çıkmanın en basit yoludur, ancak yuvarlanmaktan çok daha fazla güç gerektirir. Bu durumda, sistem her iki modu da kullanır: iki tekerlek üzerinde rampa yukarı çıkarken, iki rotor harekete yardımcı olur (bkz: chukar kuşu).
Görsel Kaynakları: Doğa İletişimi
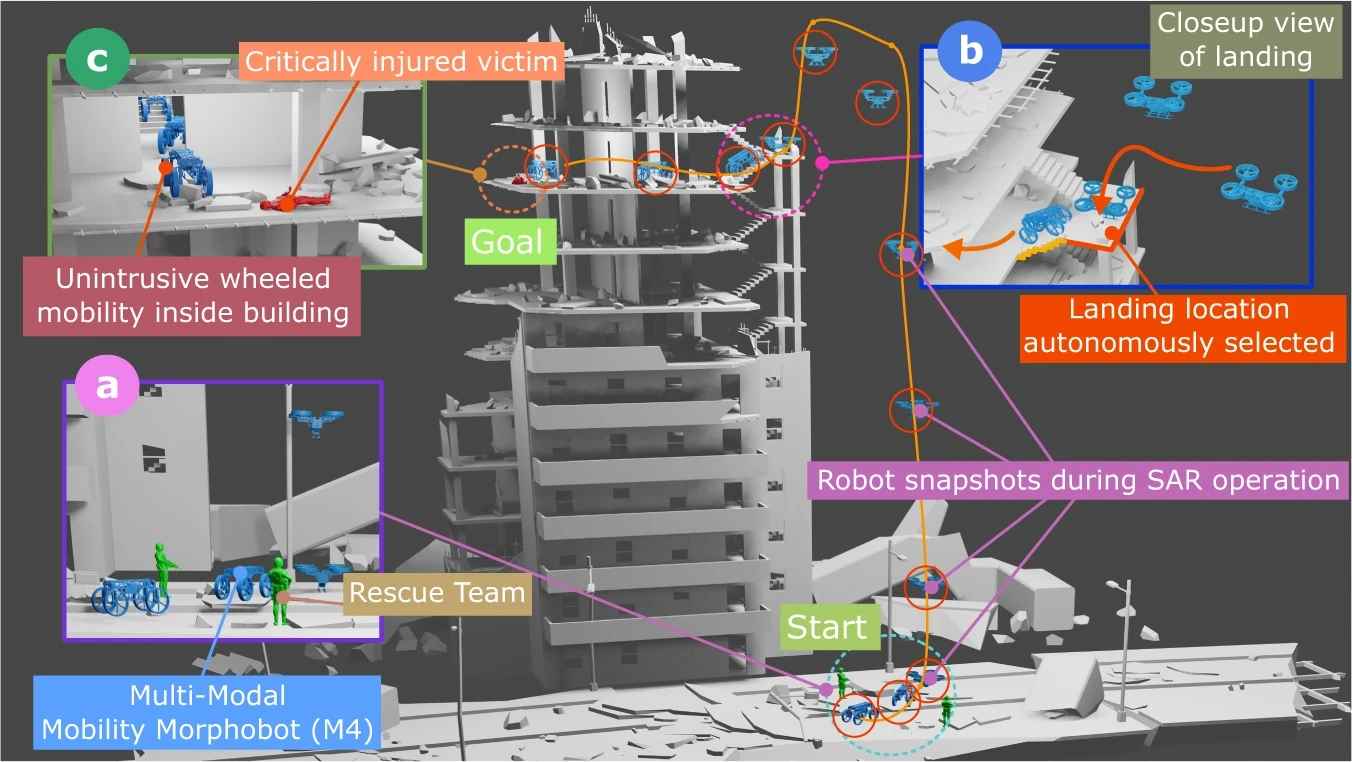
Akıllıca bir tasarım olsa da birçok durumda aşırıya kaçabilir. Yalnızca tekerleklere, rotorlara veya ayaklara güvenerek gayet güzel bir şekilde gerçekleştirilebilecek pek çok görev vardır. Ekip, potansiyel bir uygulama olarak deprem ve sel gibi doğal afetlerden sonra arama kurtarma görevlerine işaret ediyor.
Gazeteye göre, “Sel gibi benzersiz olayların ardından, manzarayı farklı şekilde tahrip eden bir başka olaya eşlik edebilir.” “Bir kasırga yollara ve binalara sel ve rüzgar hasarı verebilir. Ya da heyelan, büyük bir kaya kütlesinin yokuş aşağı hareket etmesine, nehre baraj yapılmasına ve sel oluşmasına neden olabilir. Bu senaryolarda M4, arama ve kurtarmada çeşitli görev gereksinimlerine uyan hareketliliğe ulaşmak için çok yönlülüğünden yararlanabilir.”