
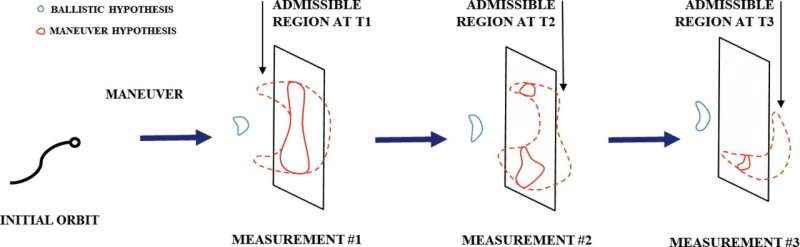
Bir manevra durumunda ölçüm ilişkilendirme sırasının taslağı. Nesneye erişilebilen alan, kabul edilebilir kontrol bölgesi tarafından verilir. Kredi: Uzay Araştırmalarındaki Gelişmeler (2022). DOI: 10.1016/j.asr.2022.02.034
Universidad Carlos III de Madrid (UC3M), Polytechnic University of Milan ve GMV şirketinden araştırmacılar, şu anda kullanımda olan sistemlerin çalışmasını iyileştiren uydu manevralarını tespit etmek ve tahmin etmek için yeni bir metodoloji geliştirdiler. Halihazırda operasyonel ortamlarda test edilmekte olan bu gelişme, uzay enkazı sorununun azaltılmasına yardımcı olabilir.
Avrupa Uzay Ajansı (ESA) ve NASA kataloglarına göre, Dünya yörüngesindeki uyduların ve uzay enkazı parçalarının sayısı şu anda 30.000 civarındadır, ancak bu alandaki araştırmacılar gerçek sayının 100.000 civarında olduğunu tahmin etmektedir. Yaklaşık bir santimetreden daha büyük herhangi bir nesne bir çarpışma durumunda ciddi hasara neden olabilir.
“Uzay enkazı” katalogları, operasyonel uyduların olası tehlikelerden kaçınmak için manevralar yapmasına izin verir. Bununla birlikte, bazı uyduların otomatik olarak gerçekleştirdiği bu aynı hareketler bir sorun teşkil edebilir, çünkü doğru bir şekilde tespit edilip tahmin edilmezlerse, çarpışma riskini artıran kataloğun bozulmasına yol açarlar.
“Sorun şu ki, giderek daha fazla uydu fırlatılıyor ve bunların birçoğu, binlerce nesnenin takımyıldızlarının bir parçasını oluşturan otonom manevra kabiliyetine sahip. Bu nedenle, bu manevraları takip edebilmek için otonom olarak tespit edebilmek çok ilginç. Bu uyduların gerçek konumu,” diye açıklıyor UC3M’nin Havacılık ve Uzay Mühendisliği Departmanından araştırmacı, yakın zamanda dergide yayınlanan bu çalışmanın yazarlarından biri olan Guillermo Escribano. Acta Astronáutica.
Bu araştırmacıların geliştirdiği şey, bu uydu manevralarını daha etkin bir şekilde algılayan ve karakterize eden bir algoritmadır. Bunu yapmak için, uzay nesnelerinin (örneğin teleskoplar veya radarlar gibi) hareketini izleyen sensörlerden gelen verileri kullanır ve bunları istatistiksel bilgilerle birleştirir.
Guillermo Escribano, “Temel fikir, tüm bu ölçümleri işlemek ve bunları zaten katalogda bulunan nesnelerle ilişkilendirmektir” diyor. Yine UC3M’nin Havacılık ve Uzay Mühendisliği Departmanından bir başka araştırmacı olan Manuel Sanjurjo Rivo, “Bununla, uydular farkında olmadığımız manevralar yapsa bile onları takip edebiliyoruz” diyor.
Araştırmacılara göre bu gelişme, şu anda kullanımda olan uzay nesnesi izleme ve kataloglama sistemlerinin doğruluğunu artırmak için kullanılabilir ve bu da uzay enkazı sorununu azaltmaya yardımcı olabilir. Aslında algoritma, uzay nesnesi kataloglama sistemleri için izleme ve doğrulama kampanyaları yürütmek üzere bu makalenin yazarları olan diğer araştırmacıların çalıştığı GMV şirketi tarafından zaten uygulandı.
Bu bağlamda, sadece nesnelerin uzaydaki konumu ve hızı hakkında bir tahmine sahip olmak değil, aynı zamanda izleme sensörleri ve hatta uzay aracı operatörleri tarafından sağlanan bilgileri dikkate alarak bu tahminlerin belirsizliğini doğru bir şekilde karakterize etmek de önemlidir.
“Veri güncelleme süreleri yaklaşık 12 saat arasında değişen izleme sensörlerinden elde edilen bilgilerin türüne göre, dinamik bilgisi önemlidir. Bu nedenle manevralar, nasıl olduğuna dair güvenilir bilgi eksikliği nedeniyle mevcut otomatik ilişkilendirme ve tahmin sistemleri için bir zorluk teşkil ediyor. nesne hareket ediyor,” diye bitiriyor Manuel Sanjurjo Rivo. Bu araştırma çerçevesinde önerilen gelişmelerin önemi buradan kaynaklanmaktadır.
Ek çalışma yayınlandı Uzay Araştırmalarındaki Gelişmeler.
Daha fazla bilgi:
Lorenzo Porcelli ve diğerleri, Radar anket gözlemleriyle Uydu manevra tespiti ve tahmini, Acta Astronautica (2022). DOI: 10.1016/j.actaastro.2022.08.021
G. Escribano ve diğerleri, Stokastik hibrit sistem formülasyonuna dayalı optik araştırma senaryolarında uzay nesnelerinin otomatik manevra tespiti ve takibi, Uzay Araştırmalarındaki Gelişmeler (2022). DOI: 10.1016/j.asr.2022.02.034
Universidad Carlos III de Madrid – Oficina de Información Científica tarafından sağlanmıştır.
Alıntı: Uydu manevralarını daha doğru algılama ve tahmin etme (2023, 21 Haziran), 21 Haziran 2023’te https://phys.org/news/2023-06-satellite-maneuvers-accurately.html adresinden alındı
Bu belge telif haklarına tabidir. Kişisel çalışma veya araştırma amaçlı adil ticaret dışında, yazılı izin olmaksızın hiçbir bölüm çoğaltılamaz. İçerik sadece bilgilendirme amaçlıdır.