
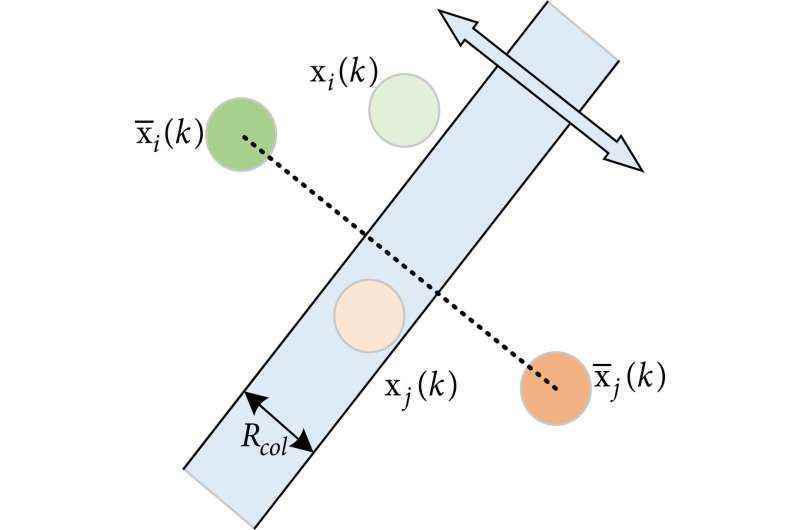
Mikro uydular arasında çarpışmadan kaçınma şeması. Kredi: Uzay: Bilim ve Teknoloji (2022). DOI: 10.34133/2022/9802195
Ortaya çıkan bir çoklu uydu ortak uçuş modu olarak, mikro uydu sürüsü, dağıtılmış uzay sistemleri için gelecekteki önemli bir araştırma konusu haline geldi. Düşük maliyetli, hızlı yanıt ve işbirlikçi karar verme sunar. Otonom ajanlar için sürülerin koordinasyonunu ele almak için, farklı görev hedeflerine sahip alt sürüleri içeren olasılıksal bir rehberlik yaklaşımı araştırılmıştır.
Olasılığa dayalı sürü rehberliği, otonom mikro uyduların, tüm sürünün istenen dağılım şekline yakınsaması için bağımsız yörüngelerini bağımsız olarak oluşturmasını sağlar. Bununla birlikte, çarpışmadan kaçınma algoritmasının tasarımına zorluklar ekleyen mikro uydular arasındaki çarpışma olasılığını azaltmak için kalabalıktan kaçınmak önemlidir.
Yakın zamanda yayınlanan bir araştırma makalesinde Uzay: Bilim ve TeknolojiNorthwestern Politeknik Üniversitesi Otomasyon Okulu’ndan Bing Xiao, bir mikro uydu sürüsünün makro-mikro yörünge optimizasyonunu sağlamayı amaçlayan bir Centroidal Voronoi mozaikleme (CVT) ve Model Tahmini Kontrol (MPC) tabanlı sentez yöntemi önerdi.
Yazar, sürü mikro uydularının 3B uzayda transfer modelini formüle etti ve olasılıksal sürü rehberlik yasasını tanıttı. Daha sonra, mikro uydular arasındaki çarpışma olasılığını azaltmak için kalabalıktan kaçınmak gerekli olduğundan, herhangi bir zamanda tüm mikro uydular arasındaki minimum mesafenin alt sınırını bulmaya dayalı olarak çarpışmadan kaçınma vatkasının güvenlik analizi yapıldı.
Mevcut konumdan hedef uzaya her bir mikro uydunun çarpışmasız kılavuz yörüngesini belirlemek için bir çarpışmadan kaçınma algoritması gerekliydi. Ancak, makroskopik modelleri kullanan üst düzey koordinasyonla, çarpışmasız yörüngeler oluşturmak çok zordu. Bu nedenle yazar, yörünge planlamasının makro planlama ve mikro planlamaya bölündüğü bir sentez yöntemi sundu.
Daha sonra yazar, mikro uydu sürüsünün sırasıyla makro planlama ve mikro planlama detaylarını sunmuştur. Mikro uydu sürüsünün Makro planlamasında, her bir mikro uydunun hedef konumu, CVT algoritması aracılığıyla oluşturulan ağırlık merkezi tarafından belirlendi ve tüm mikro uydular, algoritma yakınsayana kadar ilgili merkeze taşındı.
Mikro uydu sürüsünün uzaydaki nihai dağılımı, ağırlık merkezinin konumuna göre elde edildi. Mikro uydu sürüsünün Mikro planlamasında, her adım için en uygun yörüngeleri oluşturmak üzere MPC benimsendi ve sonunda hedef küpte belirtilen konuma ulaştı.
Spesifik olarak yazar, J’yi göz önünde bulundurarak yörünge dinamiği modelini kurdu.2 sürünün yeniden yapılandırılması sürecinde çarpışmadan kaçınma kısıtlamalarının dışbükeyleştirilmesini uyguladı. Gerçek zamanlı yörünge planlamasına ulaşmak için, mevcut durum bilgisine dayalı olarak en uygun yörüngeleri güncellemek için uzaklaşan bir ufuk kullanan model tahmine dayalı kontrol tanıtıldı. Önemli bir şekilde, önerilen yöntem sadece makro düzeyde manevra yapan mikro uydu sürüsünün çarpışmadan kaçınmasını gerçekleştirmekle kalmaz, aynı zamanda mikro düzeyde sürü bireylerinin her bir mikro uydusu için optimal yörüngeler sağlar.
Son olarak, mikro uydu sürüsü için önerilen makro-mikro yörünge planlama yöntemini doğrulamak için sayısal simülasyon gerçekleştirilmiştir. Yazar sanal bir merkezi mikro uydu verdi ve çok yönlü uçuş konfigürasyonuna sahip büyük ölçekli (300) bir mikro uydu sürüsü tasarladı. Bölgeleri bölmek ve bir sonraki anda aktarılacak mikro uyduların konumunu belirlemek için CVT algoritması kullanıldı.
Daha sonra transfer işleminde küplerden biri seçilip üzerinde CVT yapılarak mikro uydunun transfer pozisyonu belirlendi. 50 iterasyondan sonra kararlı bir konfigürasyon elde edildi ve bir sonraki anda mikro uydunun hareket ettiği konum belirlendi. Mikro uydu kümesinin büyük ölçeği nedeniyle, nihai konfigürasyona ulaşma süreci birçok geçiş gerektirdi.
Model öngörücü kontrolüne dayalı olarak önerilen yörünge optimizasyonunu doğrulamak için, belirli bir anda başlangıç noktasından sonraki istenen hedef noktasına mikro uydulardan biri seçildi. Bireysel mikro uydular istenen noktaya iyi bir şekilde ulaşabilir. İstenen noktaya ulaşıldıktan sonra bir sonraki iterasyon gerçekleştirilecek ve yörünge dinamiğinin etkisiyle mikro uydu, kontrol kısıtlamaları olmadan hedef nokta olarak kalmayabilir.
Mikrosatellit sürüsünün misyonunu daha pratik hale getirmek için, mikro-planlamada MPC, mikro uydu sürüsünün yakıt tüketimi ve kaynak kullanımı açısından performansını artırmak için kullanıldı. Bu nedenle, mikro uyduların çarpışmasız rehberlik yörüngesi hakkındaki simülasyon sonuçları, mühendislik uygulamasıyla iyi uyum sağlayan planlama şemasının faydalarını doğruladı.
Xiwei Wu ve diğerleri, Centroidal Voronoi Mozaikleme ve Model Öngörülü Kontrol Tabanlı Makro-Mikro Yörünge Optimizasyonu Mikrouydu Sürü, Uzay: Bilim ve Teknoloji (2022). DOI: 10.34133/2022/9802195
Beijing Institute of Technology Press Co., Ltd tarafından sağlanmıştır
Alıntı: Mikro uydu sürülerinin yörüngesinin makro-mikro perspektiften tasarlanması (2022, 21 Ekim), 21 Ekim 2022’de https://phys.org/news/2022-10-trajectory-microsatellite-swarms-macro-micro-perspective’den alınmıştır. html
Bu belge telif haklarına tabidir. Özel çalışma veya araştırma amaçlı herhangi bir adil işlem dışında, yazılı izin alınmadan hiçbir bölüm çoğaltılamaz. İçerik yalnızca bilgi amaçlı sağlanmıştır.