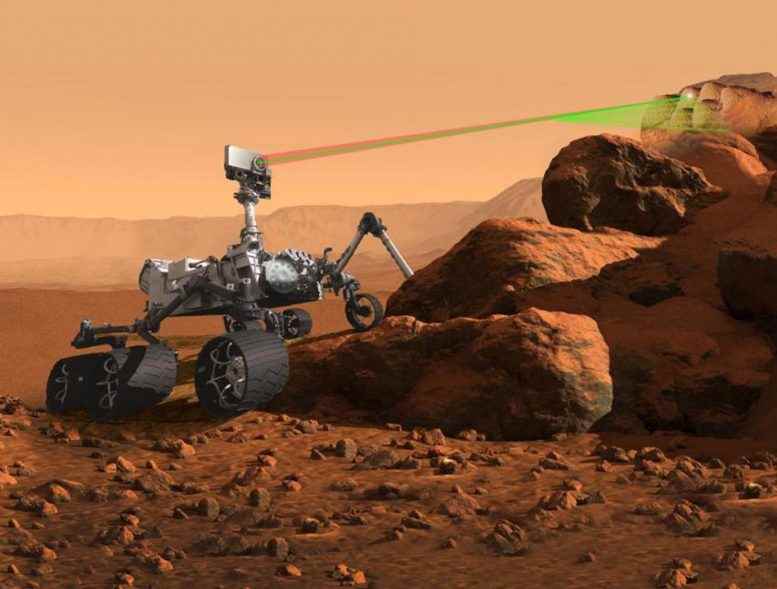
Mars Perseverance Rover’ın SuperCam aletini kullanarak bir kayanın neyden yapıldığını test etmek için lazerle zaplama işlemini gösteren bir çizim. Kredi bilgileri: NASA
NASA‘s Mars Perseverance Rover, robotik kol, matkap, direk, alet kılıfları, yüksek kazançlı anten ve hareketlilik sistemi dahil olmak üzere çok sayıda hareketli parçaya sahiptir. Hareket sırasında gezici gövdesi veya Mars yüzeyi ile istenmeyen bir çarpışma, onarılamayacak hasarlara neden olabilir. Ek olarak, SuperCam cihazı LIBS lazerini yüzeye vurarak bir plazma ve spektroskopi gerçekleştirin ve ayrıca lazerin gezicinin herhangi bir bölümünü zaplamasını önlemek istiyoruz.
Bunu önlemek için Perseverance, Rover Collision Model uçuş yazılımını kullanarak yaklaşan hareketleri ve lazer ateşlemeyi kontrol eder ve herhangi bir çarpışma meydana gelmeden önce herhangi bir aktiviteyi otonom olarak durdurur. Robotik kol çarpışma kontrollerini gerçekleştirmek için Perseverance, bir sonraki kolu geleceğe yansıtır ve bu hareketin herhangi bir noktasında gezici gövdeyle çarpışıp çarpışmayacağını kontrol eder. Öngörülen hareketin beklenmedik çarpışmaları yoksa, harekete başlamaya izin verir. Zaman zaman kolun donanıma çok yaklaşması ve hatta örneğin kenetlenme sırasında matkap uçlarını veya önbellek numunesini değiştirmek için gezici gövdesinin diğer kısımlarına dokunması gerekir. Gezici, temasların ne zaman kasıtlı olduğunu bilir ve bunların gerçekleşmesine izin verir. Perseverance, AEGIS kullanarak yerleşik bilim hedeflerini otonom olarak seçtiğinde, SuperCam hedefleme için bir hedef seçmeden önce çarpışmalarla sonuçlanabilecek hedefleri filtrelemek için Rover Çarpışma Modelini kullanır.

Mars Perseverance Sol 374 – Ön Sağ Tehlikeden Kaçınma Kamerası: NASA’nın Mars Perseverance gezgini, önündeki alanın bu görüntüsünü yerleşik Ön Sağ Tehlikeden Kaçınma Kamerası A’yı kullanarak elde etti. Bu görüntü 10 Mart 2022’de (Sol 374) alındı. Kredi: NASA/JPL-Caltech
Tipik olarak operasyon ekibi, bir kez bir kez geziciye komutlar gönderir ve bu faaliyetlerden bazıları planlandığı gibi gitmezse, Azim’in kendisini koruması gerekir. Matkap, Sol 374’te olduğu gibi küçük bir hatayla bile karşılaşacak olsaydı, robotik kol beklenmedik bir şekilde hala gezicinin önünde olabilir ve hedefe dokunabilirdi. Ertesi sabah aynı planın devamı olarak planlanan LIBS ateşlemesi, şimdi kol tarafından engellenen bir kayayı zaplamak için işaret edildi. Bu, Sol 375’teki Rover Çarpışma Modeli tarafından amaçlandığı gibi zarif bir şekilde önlendi.
Çarpışma kontrolü uçakta otonom olarak gerçekleşir ve operasyon ekibi tipik olarak herhangi bir açık komut uygulamaz. Yer simülasyonu sırasında bir hamle çarpışma kontrolünde başarısız olmadıkça ve ayarlanması gerekmedikçe, operasyon ekibi bunu fark etmeyebilir bile. Rover Collision Model, tasarladığım ve programladığım uçuş yazılım modüllerinden biriydi, bu yüzden arka planda ne yaptığını düşünmeden edemiyorum. Sol 460 itibariyle, Mars’ta 64.000’den fazla çarpışma kontrolü gerçekleştirdi ve beklendiği yerde çarpışmaları bildirdi.
Hogwallow Dairelerine geldik. Heyecan verici bir bilimsel araştırma gerçekleştirirken gezicinin daha fazla çarpışma ve zap kontrolü yaptığını görmeyi dört gözle bekliyorum.
NASA / Robotik Operasyonlar Baş Mühendisi Vandi Verma tarafından yazıldı.JPL.