Kredi bilgileri: Pavel Odinev/Skoltech
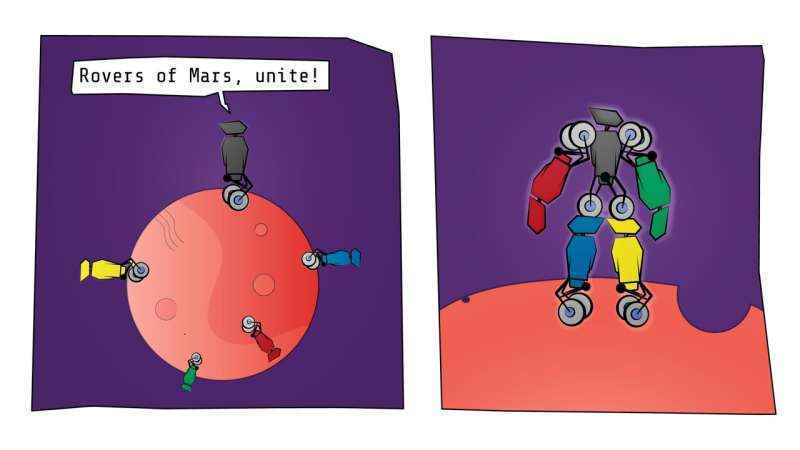
Skoltech bilim adamları, modüler bir Mars keşif gezici için bir konsept önerdiler. İşbirlikçi robotiğin gücünden yararlanan yeni sistem, ilk olarak bir Acta Astronautica kağıt, bağımsız olarak çalışabilen veya çeşitli takımyıldızlarda bir araya gelebilen dört iki tekerlekli robottan oluşur. Araştırmaya göre, bu yaklaşım, gezegenin tarihi, potansiyel yaşanabilirliği ve olası yüzey suyu izleri veya önceki yaşam hakkında daha fazla bilgi toplayan daha uzun keşif misyonlarını mümkün kılacaktır.
NASA’nın ilk başarılı Mars gezgini Pathfinder 1997’de Kızıl Gezegene indiğinden beri, araştırmacılar aynı temel tasarımı kullandılar: gemide bir dizi bilimsel alet taşıyan altı tekerlekli otonom bir keşif aracı. Günümüzde araştırmacılar, bir Mars görevinin, farklı konumlarda farklı görevleri aynı anda yürüten ve bazen daha zorlu görevler için bir araya gelen çeşitli donanımlı birkaç robottan oluşması durumunda aynı zaman diliminde daha fazlasını başarabileceğini öne sürüyorlar.
“Bu temelde bir optimizasyon sorunudur: Görevin maliyetini çatıdan geçirmeden keşif süresini ve kat edilen mesafeyi nasıl en üst düzeye çıkarırsınız?” Skoltech Doktora Öğrenci ve çalışmanın ilk yazarı Alexander Petrovsky yorumladı. “Altı tekerlekli bir gezici kullanmanın yetersiz olabileceğini bulduk. Hesaplarımıza göre, dört iki tekerlekli makine gitmek için en iyi yol. Her biri, dört modülün tümünde yalnızca kritik yük bulunan benzersiz araştırma araçları taşıyacak.”
Bu şekilde, dört robottan üçü başarısız olsa bile, kalan robot yine de oldukça fazla iş yapabilir ve bulgularını Dünya’ya iletebilir. Bu, sona erdiği zaman görevin nihai sonuçlarını en üst düzeye çıkarır. Bir şeyleri tutmak gibi maksimum stabilite gerektiren işlemler gerçekleştirirken, güvenli tarafta olmak ve düşmekten kaçınmak için iki tekerlekli bir çift gezici dört tekerlekli bir araç haline gelebilir.
Petrovsky, “Temel olarak, azaltılmış stabilite, sürü gezici senaryosu için makul derecede iyi veya daha iyi göründüğünü düşündüğümüz diğer tüm parametrelerle birlikte ana dezavantajdır,” diye ekledi. “Bununla birlikte, iki tekerlekli robot teknolojisi, bu şeyleri eskisinden daha kararlı hale getirmek için uzun bir yol kat etti, bu yüzden bu bile şimdi biraz daha az sorun.”
Bilim adamı, “Mobil robotların sürüsünü denetleyen yapay zeka teknolojileri, yeni bir teknolojik gezegen keşfi seviyesinin kapılarını açacak” diye devam etti. Ona göre, Mars’ın keşfine yönelik sürü robotu teknolojisi, Ay görevlerine ve hatta Dünya’daki projelere de fayda sağlayabilir. Örneğin, benzer iki tekerlekli robotlar, tarımsal bitkilerin büyümesini izlemek ve onları etkileyen zararlıları veya hastalıkları tespit etmek için kullanılabilir. Petrovsky, “Temmuz 2021’de, Rusya’nın Krasnodar kentinde mahsuller üzerinde iki tekerlekli küçük robotlarla bazı saha testleri yaptık.” Dedi. Bunun yanı sıra modüler yaklaşım, arama kurtarma operasyonları için geliştirilen robotiklere de fayda sağlayabilir.
Alexander Petrovsky ve diğerleri, Mars keşfi için iki tekerlekli robotik sürü konsepti, Acta Astronautica (2022). DOI: 10.1016/j.actaastro.2022.01.025
Alıntı: Böl ve yönet: Mars gezicilerinin yerini iki tekerlekli robot sürüleri alabilir (2022, 14 Nisan) https://phys.org/news/2022-04-conquer-mars-rovers-superseded- adresinden 14 Nisan 2022 alındı swarms.html
Bu belge telif haklarına tabidir. Özel çalışma veya araştırma amaçlı herhangi bir adil işlem dışında, yazılı izin alınmadan hiçbir bölüm çoğaltılamaz. İçerik yalnızca bilgi amaçlı sağlanmıştır.